
密歇根科学公司的 车轮脉冲传感器 (WPT) 是一种紧凑型编码器系统,旨在连接到车辆的车轮上。 来自 WPT 的编码器信号可用于计算 旋转速度,角位置和车轮的旋转方向。 这些测量通常用于跟踪车辆的位置,用于电动汽车开发和自动车辆跟踪等应用。
自动驾驶车辆跟踪
自动驾驶汽车依靠全球导航卫星系统 (GNSS) 技术来跟踪其位置,但这些系统在城市、室内或地下环境中可能会失效。 在无法使用 GNSS 跟踪的地区,必须使用车轮脉冲传感器或加速度计等其他技术来跟踪车辆的位置。 WPT 系统可用于跟踪仓库内自动叉车或自动地下采矿设备的位置。 此外,WPT 系统可用于测试和验证基于加速度计的系统的准确性。
WPT 传感器说明
该组件旨在 快速轻松地安装到车轮上。 其紧凑轻巧的设计由坚固外壳中的电子设备组成。 WPT 通过以下方式安装到车轮上 快速连接凸耳螺母夹头 或加长的凸耳螺母。 转接板和快速连接凸耳螺母夹头有多种尺寸和配置,可满足任何标准车轮尺寸。 一个 磁性车辆定子约束 当传感器在车辆上使用时,约束杆用于将编码器模块定子固定到位。 由于车辆测试的性质,WPT 的设计非常坚固。 WPT 具有 IP67 等级的旋转密封件,非常适合在雨天、下雪或肮脏的环境中进行测试。
快速轻松地安装到车轮上。 其紧凑轻巧的设计由坚固外壳中的电子设备组成。 WPT 通过以下方式安装到车轮上 快速连接凸耳螺母夹头 或加长的凸耳螺母。 转接板和快速连接凸耳螺母夹头有多种尺寸和配置,可满足任何标准车轮尺寸。 一个 磁性车辆定子约束 当传感器在车辆上使用时,约束杆用于将编码器模块定子固定到位。 由于车辆测试的性质,WPT 的设计非常坚固。 WPT 具有 IP67 等级的旋转密封件,非常适合在雨天、下雪或肮脏的环境中进行测试。
编码器信号调节器
WPT 光学编码器分辨率高达每转 5,000 个脉冲 (ppr)。 标准分辨率包括 360 ppr、512 ppr、1024 ppr 和 5,000 ppr。 可根据要求提供其他分辨率。 所有编码器选择都有四个标准编码器输出:A、B、I 和 A⊕B。 输出 A 和 B 正交,这意味着它们的相位相差 90 度。 输出 A⊕B 是两个通道的异或,它使编码器的标准分辨率加倍。 输出,0 到 5 个数字伏特脉冲,可以驱动 TTL 负载。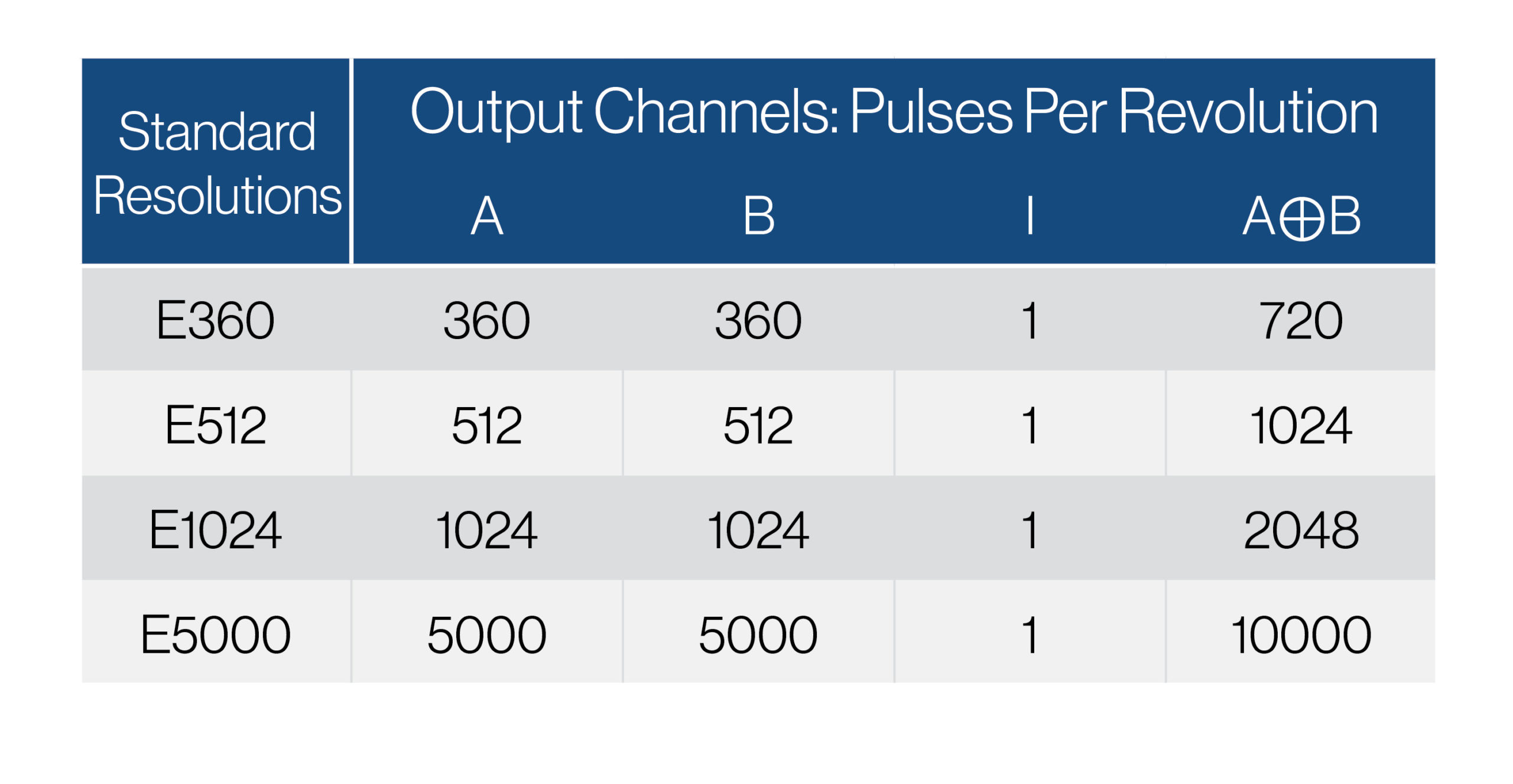
密歇根科学 EC-LV 编码器信号调节器 将 WPT 传感器编码器的 0 到 5 数字伏特脉冲转换为与角位置和角速度成比例的线性电压。 EC-LV 可以与定子电缆串联添加,不需要额外的编程。 外部开关允许用户选择速度范围和旋转方向。
如果您有兴趣了解有关如何将车轮脉冲传感器用于您的应用的更多信息,请 联系密歇根科学代表 !