
密歇根科学 高分辨率轮式脉冲传感器 (WPT) 是一种光学编码器 连接到凸耳螺母 车轮的。 WPT 通常用于跟踪车辆的位置和速度,用于车队管理和 自动驾驶车辆跟踪. 本案例研究将展示同时使用两个车轮脉冲传感器的准确性,将位置和速度测量值与 GPS 数据进行比较。
如何操作
来自编码器的信号用于计算车轮的角位置和速度。 汽车两侧的两个 WPT 记录的数据可以平均以找到中心,从而最准确地表示汽车行驶的距离和速度。 测绘车辆通常使用 WPT 来补偿 GPS 信号中断,从而可以跟踪信号丢失期间行驶的距离。 在这项研究中,WPT 数据的高分辨率表现比所使用的 GPS 传感器好得多,因为它具有 10,000 Hz 的高采样率。
测试设置
为了将车轮脉冲传感器的结果与 GPS 结果进行比较,将两个 WPT 系统连接到车辆上,一个在右后侧,一个在左后侧。 传感器安装在后轮上,因此不必在数据中补偿前轮的转动运动。 GPS 设备放置在车辆顶部,后轮上方的车顶中央,可以提供最准确的读数。 左右 WPT 距离和速度被平均以匹配车辆中心的 GPS 信号。 下面显示的一英里长的路线,连同来自 GPS 的纬度和经度图,包括一个回旋处和一个之字形机动。
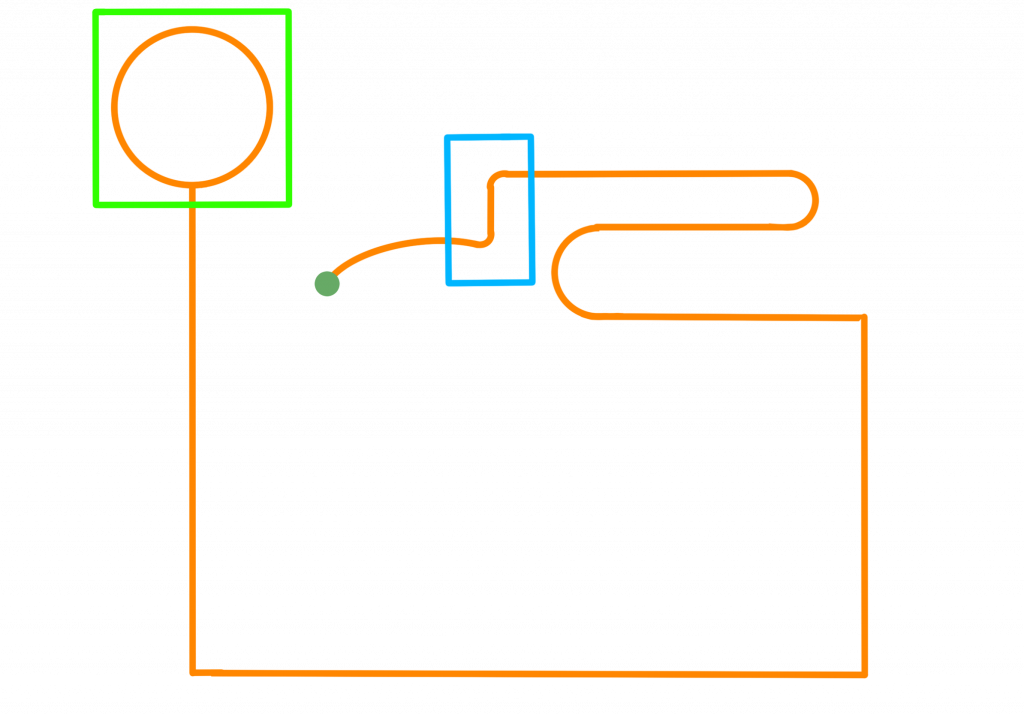
测试轨道大纲
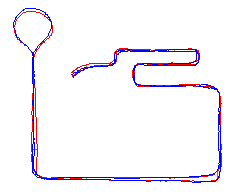
来自测试轨道的 GPS 数据
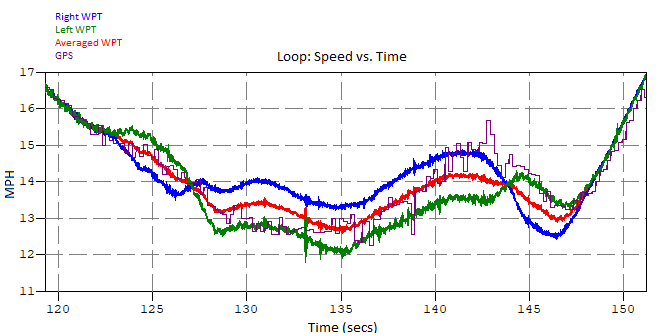
循环
当绕着测试轨道的圆形部分(如上图绿色所示)逆时针行驶时,人们会期望右轮的速度和距离比左轮高得多。 查看如下所示的数据,发现这是真的。 右(蓝色)和左(绿色)车轮速度是平均的(红色),与 GPS 数据(紫色)几乎完美地对齐。
之字形路径
包含快速右转和左转的区域,显示在测试轨道轮廓上的蓝色方块内,提供了另一个有趣的视角。 对于下面的速度图,车辆先快速左转,然后立即右转。 由此创建的“W”形显示左轮(紫色)在左转时比右轮(绿色)慢,然后在右转时左轮比右轮快。 当双方在整个机动过程中交换位置时,计算出的平均值(红色)和 GPS 数据(蓝色)在中间保持紧密。
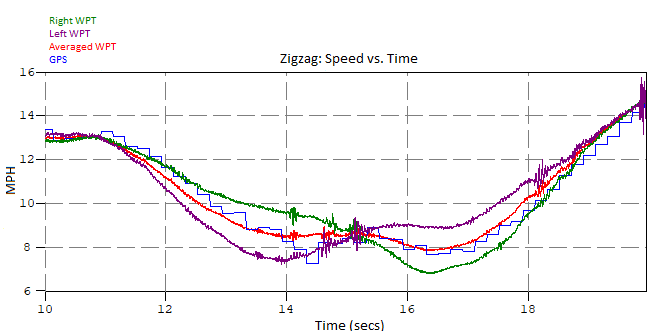
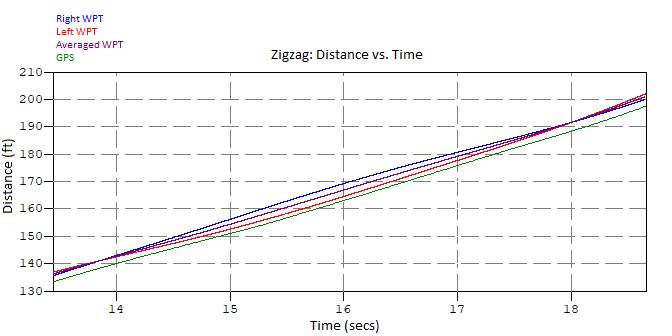
下图中两个交叉点之间的时间是发生左转和右转的地方。 右轮(蓝色)在行驶距离上超过左轮(红色),因为它在左转期间有更大的半径,从大约 14 秒开始到大约 15.5 秒结束。 此时,右轮比左轮行驶得更远。 右转在 17 秒前开始,左轮在大约 18 秒结束时赶上右轮。 行驶的平均(紫色)距离保持在两者之间。 因为平均距离的斜率和 GPS 是一样的,所以它们仍然记录相同的速度和距离的变化。 然而,GPS 滞后于车轮几英尺,因此数据略有偏移。
误差
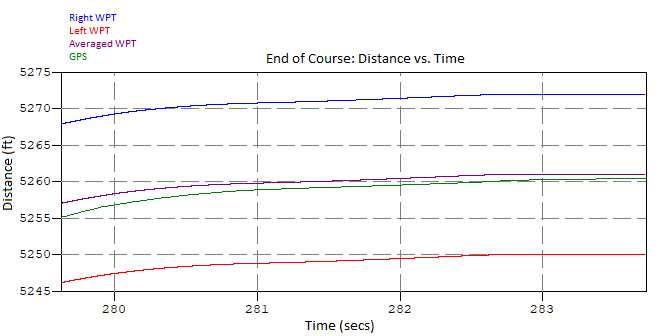
测试的最后几个数据点可以显示使用两个 WPT 而不是一个的好处。 如果仅使用一个 WPT,则记录的距离的最大误差为 0.22%。 然而,通过安装两个 WPT 并对其进行平均,误差仅为 0.0115%,减少了 19 倍。这表明使用两个车轮脉冲传感器有助于减少可在多圈中累积的误差。
该测试只是利用车轮脉冲传感器进行的众多不同测试之一。 拥有耐用且精确的测量系统有利于在任何环境中准确跟踪车辆的位置和速度。 如果您想讨论您的车轮测试应用, 联系密歇根科学代表 !