
PVSR
密歇根科学 精密车辆定子约束 (PVSR) 旨在连接到任何车身,无论表面有多大或有多大弯曲。 PVSR 用于防止测量设备的静止部分(定子)在车轮旋转时旋转。 PVSR 由连接到车身的柔性磁片和用于固定定子限制杆的突出支架构成。 限位杆固定在定子上 车轮脉冲传感器 (WPT) 以及滑环组件 车轮力传感器 和 车轮扭矩传感器 组件。 PVSR 是密歇根科学公司的变体 磁性车辆定子约束 (MVSR) 现在包括一个磁盘刷插件。 它旨在将约束杆保持在支架内居中。 PVSR 在以接近零的速度测量车轮旋转时,或在车轮旋转可能会在正向和反向之间改变方向的测试期间是首选。
测试
了解使用 PVSR 的好处很重要。 本案例研究将用于演示 PVSR 如何帮助减少低速下车辆距离和速度测量中的误差。 测试是使用 WPT 和四种不同的测试进行的; 走走停停、回滚、硬停和“摆动”测试。 完整的 WPT 组件通过使用 PVSR 的约束杆连接到车辆的左后轮,如下图左侧所示。 然后使用原始 MVSR 重复这些测试,内部没有磁盘刷,如下图右侧所示。 视频用于将图形角运动数据与视觉结果进行比较。


成果
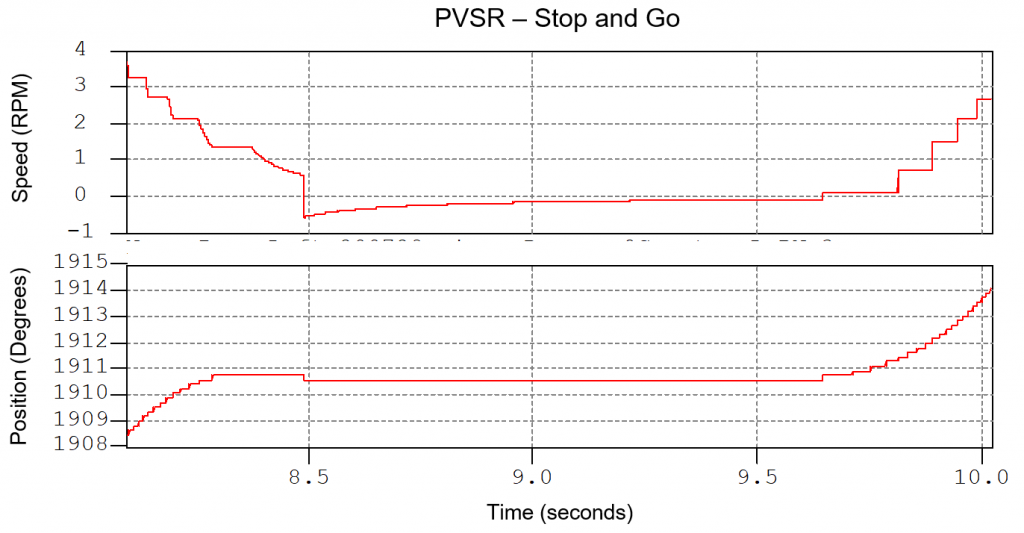
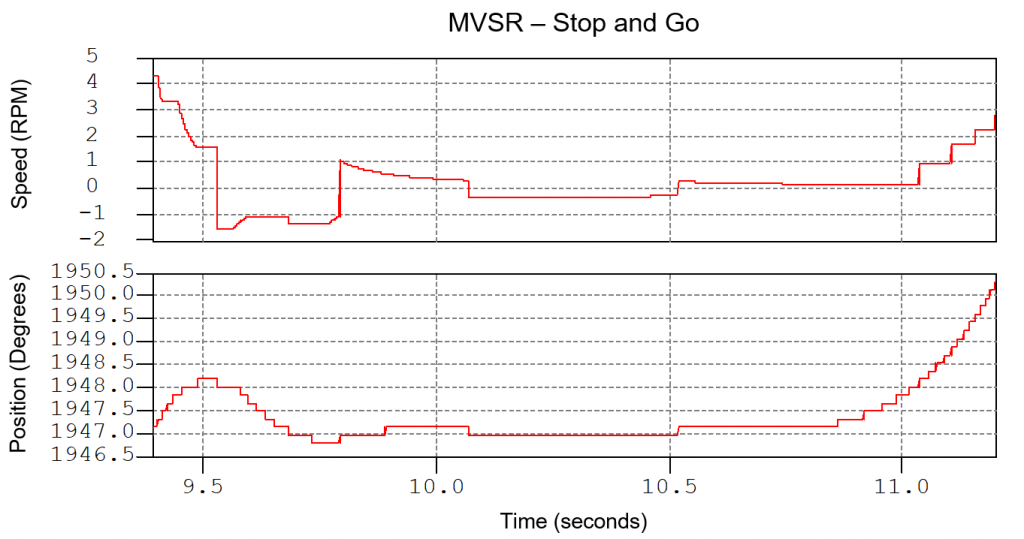
停走
该测试包括将车辆滚动到一个标记,完全停止,然后松开制动器并向前滚动。
PVSR
没有 WPT 或视频检测到的限制杆或车轮的振动,如上面速度和位置数据中的直线所示。
原始MVSR
停车时有轻微振荡,松开制动器时有反向脉冲。 这是由于原始 MVSR 中约束杆的振动造成的。
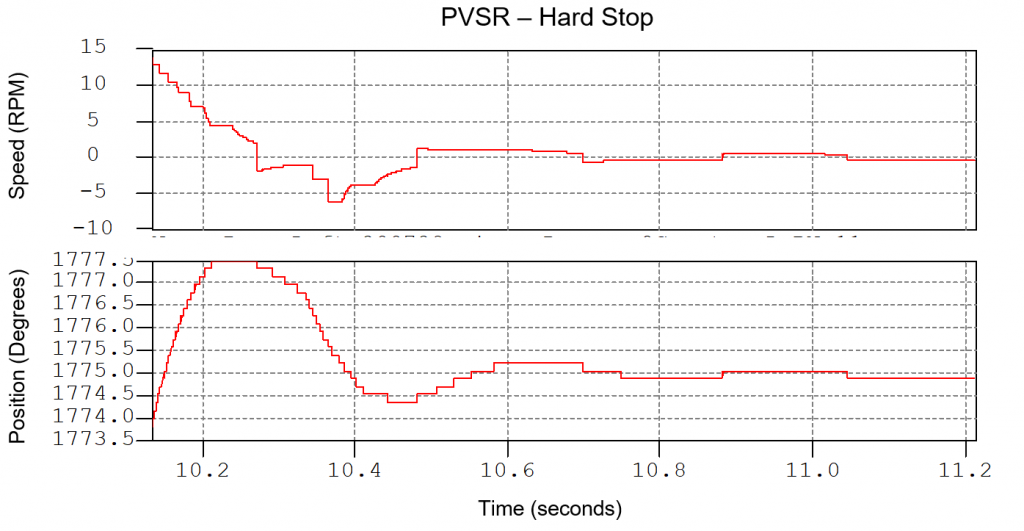
硬停止
该测试涉及加速到一个标记,然后用力制动以完全停止。
PVSR
由于车轮在停止时摆动,限制杆有轻微摆动。
原始MVSR
与 PVSR 类似,停止时有振荡。 这在数据和视频中都可以看到。 但是,该数据显示原始 MVSR 中的振荡比 PVSR 大得多。

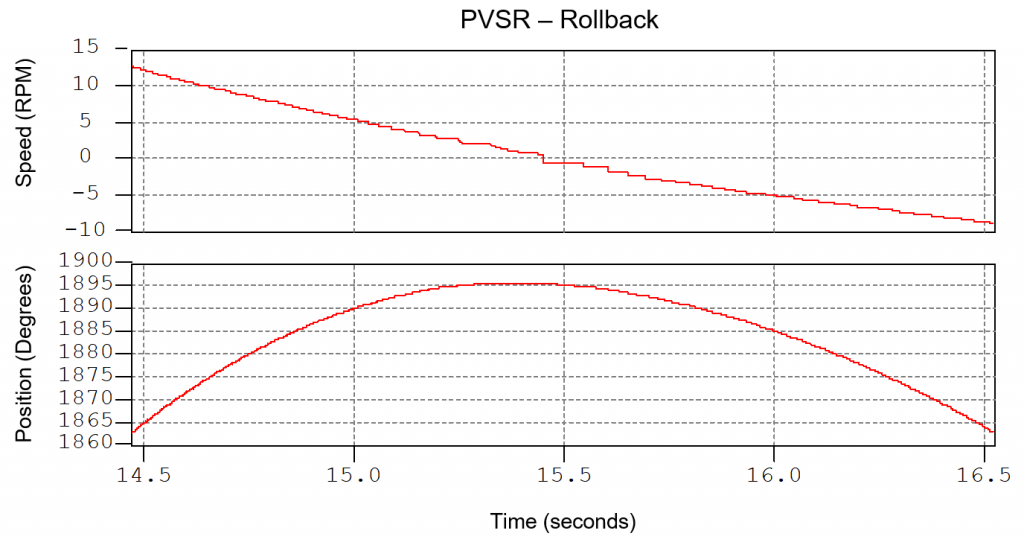
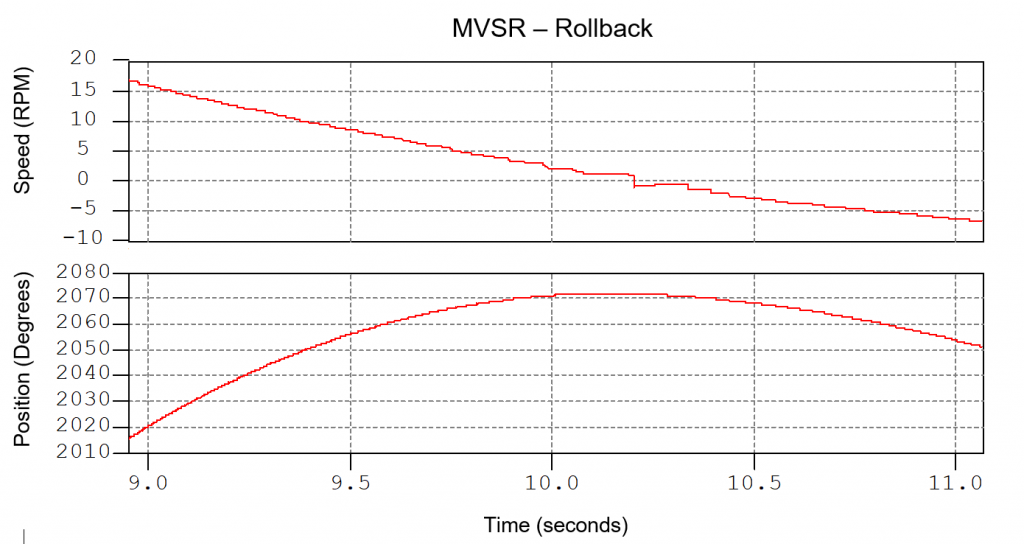
回滚
回滚测试开始时,车辆位于坡道上,稍微加速,减速至停止,然后向后滚动。
PVSR
没有振荡,这意味着限制杆保持在 PVSR 的中心。
原始MVSR
原始 MVSR 中的约束杆没有明显的振荡。
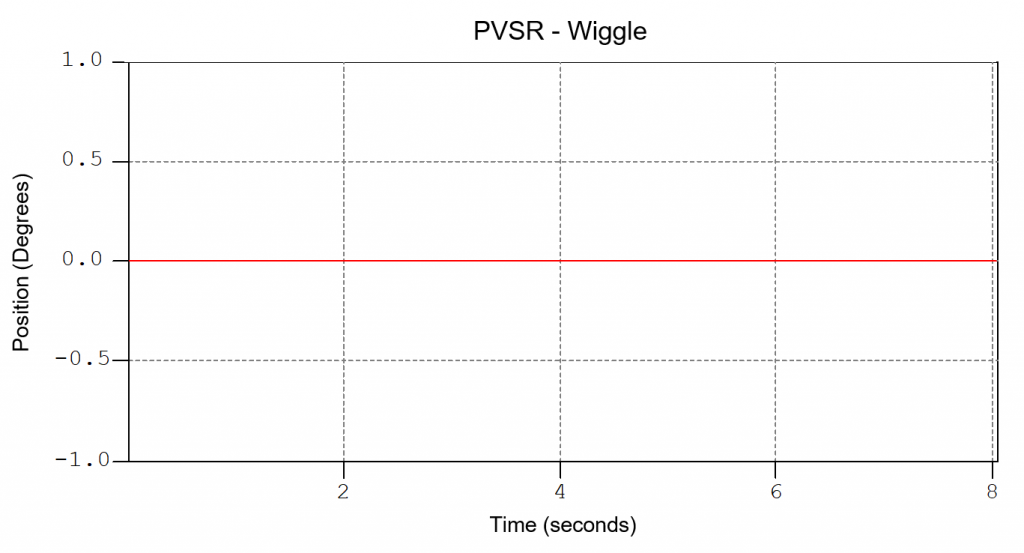
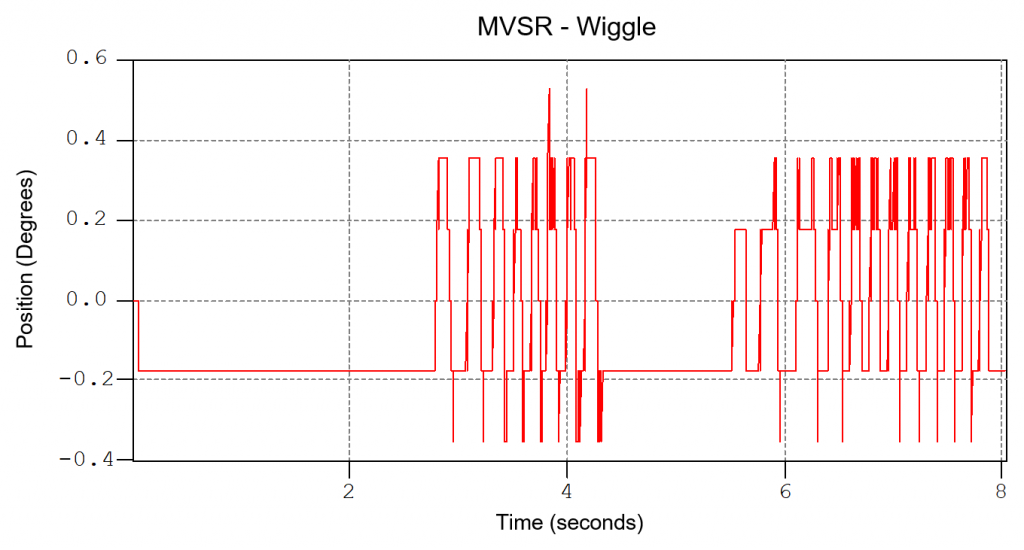
“摆动”
结果最显着的测试也是最简单的。 用手在 PVSR 和 MVSR 中来回移动限制杆。
PVSR
盘刷移动时无位移,无噪音。 这是意料之中的,因为磁盘刷的实施旨在纠正此类行为。
原始MVSR
由于在 MVSR 的圆形区域内没有任何东西可以将杆固定到位,因此大量的 被引入系统。 当使用这种类型的 MVSR 时,这种噪音可能会出现在不平坦的地形上。
本案例研究展示了 PVSR 可能优于原始 MVSR 的情况。 使用可将误差降至最低的测量设备有利于在任何环境中准确收集数据。 如果您想讨论您的测试应用,请立即联系密歇根科学公司代表。